 |
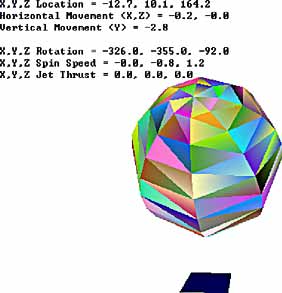
Well, I've finally got the 3D math figured out I think. It's not that it's hard or anything, it's just that I haven't done it in a very long time. But I've got it sorted out now… so I'm moving into doing the actual simulator code (before it was really a simulator of a simulator). After that comes moving the code over onto the microcontrollers and starting to fly for real.
There's some pretty revolutionary stuff in this project, so I suppose I should do some patent filing before I blabber on about it too much publicly. But to make a long story short, I've designed a high speed scanning/mapping engine that can, at extremely high speed, create fully texture mapped vector representations of cities and buildings.
Multiple robots can fly in networked chaotic formation in order to increase the effective resolution and area covered in a given time. They can also be dropped out of a moving platform (back of a truck, back of a plane, whatever), and they can return to that platform autonomously afterwards (assuming they have fuel left; they are designed to be semi-disposible). They can broadcast these maps live to a central computer, which can be fed into, among other things, first-person combat simulators.
The early goal is to allow strike forces to accurately practice in the environment they are about to enter. Why would I — someone who fundamentally objects to war — be involved in something like this? Because this type of technology saves lives on both sides — especially civilian lives. Since I can't stop war, maybe I can, in some little way, make it a little less costly.

Post a Comment